COUNTDOWN
小惑星探査機はやぶさ2
人工衛星・探査機による貢献

「はやぶさ2」機器の概要
小惑星探査機「はやぶさ2」(Hayabusa2)の主な機器、ミッション機器の概要をご紹介します。
小惑星探査機「はやぶさ2」プロジェクトメンバーが担当業務の解説と抱負を語るビデオメッセージを随時公開します。「ビデオメッセージを再生する」をクリックすると動画をご覧いただけます。
「はやぶさ2」主な機器
電気推進系(イオンエンジン)
地球から小惑星、また小惑星から地球へ航行するときの軌道変更に使います。
イオンエンジンは、地球と小惑星との往復航行を、化学推進の10分の1という少ない推進剤の消費で可能にします。
イオンエンジン
「はやぶさ」からの主な変更点
- イオン源1基のプラズマ点火不良を踏まえた対策
- →イオン源の推力発生効率の向上と点火確実性とを両立するように、各部の調整作業を入念に行いました。
- 1万時間から1万5000時間の運転後に発生した中和器3基の劣化や故障を踏まえた対策
- →中和器の長寿命化のために放電室内壁をプラズマから防護し、電子放出に必要な電圧が低減されるように磁場の強化を行いました。
- 設計変更により、イオンエンジン1台当たりの最大推力を従来の8mN(ミリニュートン)から10mNに増強することに成功しました。
化学推進系(RCS:Reaction Control System)
姿勢制御や軌道の微修正、小惑星滞在時の軌道制御に使います。
「はやぶさ2」の化学推進は「はやぶさ」同様に燃料と酸化剤を用いる2液式で、20Nの推力を出すスラスタが12基搭載されています。

スラスタ
「はやぶさ」からの主な変更点
- 「はやぶさ」タッチダウン(2回目)直後に発生した燃料漏れ(リーク)を踏まえた対策
- →バルブに異物が詰まることがないよう、清浄度管理を徹底すると同時に気密試験を強化しました。また、配管などの溶接失敗を避けるため、溶接箇所を最少化し、溶接プロセスも改善しました。
- 「はやぶさ」リーク後に発生した両系統の配管凍結を踏まえた対策
- →A系・B系の配管ルートを分離し、独立した熱制御を行う設計としました。
- 「あかつき」金星周回軌道への投入失敗を踏まえた対策
→燃料・酸化剤の調圧系を完全に分離しました。 - 「はやぶさ2」のインパクタミッション(衝突装置によって、小惑星表面に人工的なクレーターを作る)実現のための対応
- →クレーター内部への着陸のための短パルス噴射、衝突退避運用での長時間の連続噴射の達成
もっと詳しく:
通信系(アンテナ)

はやぶさ2には、2つの丸い平面アンテナ(高利得(ハイゲイン)アンテナ)のほか、中利得(ミドルゲイン)アンテナと低利得(ローゲイン)アンテナがあります。
「はやぶさ」からの主な変更点
高利得アンテナの数と形が変わりました。
- 数が1つから2つに
- →2種類の電波を使い分けて地上と通信が可能です。
片方の平面アンテナでは従来のXバンド(8GHz)の電波で通信を、もう片方では、Kaバンド(32GHz)での高速通信が実現します。
- →2種類の電波を使い分けて地上と通信が可能です。
- 形がパラボラ型から平面に
- →同性能のパラボラアンテナに比べて重さが4分の1。2つ搭載しても「はやぶさ」のパラボラアンテナより軽いです。また、熱を集めにくい利点もあります。
もっと詳しく:
ターゲットマーカ
タッチダウン(着陸)の前に人工的な目印として小惑星表面に降ろしておきます。
探査機がフラッシュをたき、カメラでターゲットマーカを認識しながら降下します。
ターゲットマーカ
もっと詳しく:
- 上空から落としても、小惑星表面で弾まないように、“お手玉※”の構造になっています。
- 堅い容器の中に小さい粒が多数はいっている構造
- 表面の素材は、光をよく反射する素材になっています。
- 「はやぶさ2」ではターゲットマーカを5個搭載。(「はやぶさ」では3個でした)
- 内部に沢山の方々の名前を刻んだ薄いシートが入っています。
再突入カプセル
再突入カプセル
はやぶさ2ミッションの一番最後に、小惑星のサンプルを封入したコンテナを内部に搭載したカプセルが、秒速12kmで地球大気に再突入し、地上で回収されます。
改良点:
オプションとして初号機に搭載されていなかった飛行環境計測モジュール(REMM)が新たに搭載され、飛行中の加速度・運動・内部の温度を計測する予定です。
観測センサ(TIR、NIRS3、ONC、DCAM3)/光学航法カメラのデータ処理機器

観測センサのデータ処理機器
はやぶさ2が科学観測ミッションで使用するセンサのコマンド処理や、それらが取得した画像など各種データの処理機器を搭載しています。
また、サンプル採取時、探査機が小惑星に接近する際の姿勢制御などに光学航法カメラが取得した画像が重要な役割を果たします。そのためのデータ処理機器も搭載しており、「はやぶさ2」の自動・自律技術の中核の一つを担います。
地上系(追跡管制設備)

相模原キャンパス 運用管制室
深宇宙を航行する探査機と通信し、追跡管制を行います。
追跡局は臼田宇宙空間観測所(長野県佐久市)など複数、管制室は相模原キャンパスにあります。
「はやぶさ2」ミッション機器
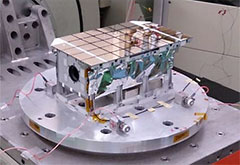
光学航法カメラ(ONC:Optical Navigation Camera)
3つのカメラ(望遠+広角2つ)で、科学観測と探査機の航法(ナビゲーション)を行います。
近赤外分光計(NIRS3: Near InfraRed Spectrometer(3は3μmより))
この機器は、小惑星からの赤外線の反射を観測し、含水鉱物の分布を調べます。
NIRS3の「3」は赤外線の3ミクロンという波長から名づけました。
- 1ミクロンは1000分の1ミリ
中間赤外カメラ(TIR:Thermal Infrared Imager)
10ミクロン帯を含む中間赤外線で小惑星を撮像します。
もっと詳しく:
小惑星の表面温度は、太陽に照らされる昼間は上昇・夜間は低下するという日変化(にちへんか:1日の間における変化)をします。砂のように細粒の土質・すきまが多い岩石では表面温度の日変化は大きくなり、中身の詰まった岩石は日変化が小さくなります。小惑星からの熱放射を撮像することにより、小惑星表面の物理状態を調べます。
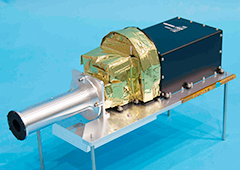
レーザ高度計(LIDAR: LIght Detection And Ranging)
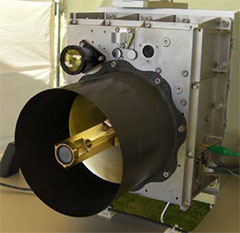
写真:エンジニアリングモデル
探査機と小惑星表面との間の距離を計測。
小惑星の地形や重力、表面の反射率(アルベド)など科学データも取得します。
計測範囲は数10m~数10km。
サンプリング装置(SMP)
写真:サンプラホーン
小惑星表面からサンプルを採取します。
基本設計は「はやぶさ」と同じで、筒状のホーン部先端が小惑星表面に触った瞬間にホーン内部で小さな弾丸を撃ち出し、表面から射出したサンプルがホーン上部に昇っていき格納庫(キャッチャ)に入る仕組みです。
「はやぶさ」からの改良点:
- 「はやぶさ2」ではシール(密閉する)性能を上げ、希ガスなど揮発性のガスも密閉して持ち帰れるよう、メタルシール方式を新たに開発し搭載しています。
- サンプルを格納するキャッチャは「はやぶさ」の2部屋から増やし3部屋にしました。※「はやぶさ2」は数度サンプル採取を実施する予定ですが、キャッチャの部屋数が多いと、実施ごとに採取したサンプルを分けて格納することができます。
- 左図に示すように、ホーンの先端に小さな折り返し部品をつける改良をしています。この折り返しの上に砂礫(されき)を引っ掛け(1~5mm程度の砂礫が乗る形状)、探査機が上昇中に急停止をすると砂礫はそのまま上昇を続けキャッチャに入る仕組みです。これは弾丸によるサンプル採取のバックアップとなります。
衝突装置(SCI)
2kgの銅の塊(衝突体:ライナ)を秒速2kmに加速して小惑星表面に衝突させることで、人工的なクレーターを作ります。
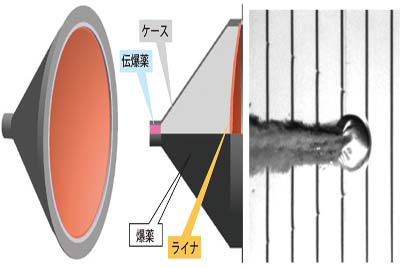
衝突装置爆薬部
左:円すい形の構造体の中に爆薬が充填されている。爆薬の力によってライナを前方に高速で射出する。
右:飛翔するライナの様子。速度はおよそ2km/s。
目標:
- 衝突体(ライナ)が衝突する前後の表面の変化から小惑星の内部構造を探査します。また、露出した地下物質のリモート観測を行い、表面物性を調べます。
- 衝突体によって作られたクレーターからのサンプリングも行い、表層下の“新鮮な”物質を採取し、表面物質との違いを調べます。
- 実際の小惑星において「宇宙衝突実験」を行い、天体衝突科学に必要なデータを得ます。
- 衝突体は、小惑星に存在する物質との区別が簡単にできるように、純銅でできています。
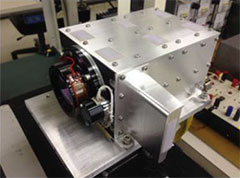
分離カメラ(DCAM3)

写真:分離カメラ(DCAM3)
ソーラー電力セイル「IKAROS」搭載DCAM1, 2の後継機 衝突装置が動作するときに撮影します。
衝突装置(SCI)による衝突実験の際、母船「はやぶさ2」は破片やダストを避けて小惑星の影に退避します。DCAM3は、母船が退避中にSCIの爆破と小惑星表面への衝突を撮影するため、分離される小型カメラです。
撮像した画像データはリアルタイムで母船に無線で送られます。
もっと詳しく:
- 衝突実験の退避中に、小惑星表面をちょうど横から見えるような位置で分離されます。
- 低分解能なかわりにリアルタイムで映像を送れるアナログカメラと、高分解画像をデジタル通信するデジタルカメラの2台が内蔵されています。
- 母船が10km以上離れても無線で画像を送ることができます。
小型ローバ(MINERVA-II)
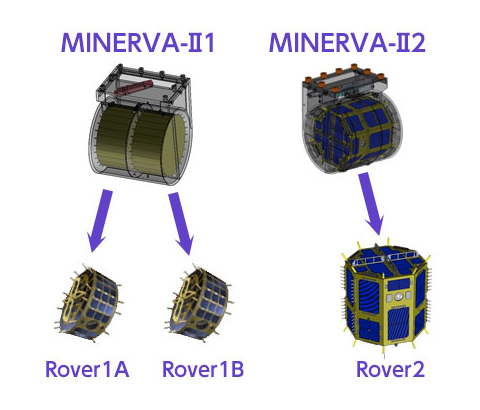
小惑星表面に降ろして表面を調べます。「はやぶさ」に搭載したMINERVAの後継機として、MINERVA-II1とMINERVA-II2を搭載します。
- 分離機構を含む総質量は、II1が2.5kg、II2が1.6kg。各探査ロボットはそれぞれホップして移動し、小惑星表面の探査を行います。
- JAXAが製作するMINERVA-II1(※)には2つの探査ローバを搭載。
(※)下記の大学、企業、研究機関の協力をいただいています。(あいうえお順)
愛知工科大学中谷研究室、会津大学、アドニクス、アンテナ技研、ウェルリサーチ、エルナー、慶應義塾大学石上研究室、システム・コンサルタンツ、セシアテクノ、デジタルスパイス、東京工業大学Co60照射室、東京大学杉田研究室、東京電機大学栗栖研究室、東京電機大学小林研究室、日東光学(現、株式会社nittoh)、マクソンジャパン、明治大学理工学部黒田研究室、DLR、NOVASPACE、ZARM - MINERVA-IIコンソーシアム(東北大学、東京電機大学、大阪大学、山形大学、東京理科大学)がMINERVA-II2を製作。
小型着陸機(MASCOT)

写真:MASCOTの開発試験用モデル
小惑星表面に降ろし、4つの観測装置で表面を調べます。DLR(ドイツ航空宇宙センター)とCNES(フランス国立宇宙研究センター)による製作・提供。
4つの観測装置(MicrOmega, MAG, CAM, MARA)を搭載し、1度だけジャンプして移動が可能です。
- 当ページに掲載されている画像等転載・二次利用できません。
利用可能な画像はJAXAデジタルアーカイブスより検索いただけます。