
小型着陸機MASCOT
岡田 逹明
MASCOT(Mobile Asteroid Surface Scout、マスコット)は「はやぶさ2」に搭載される10kg級の小型着陸機で、ドイツとフランスが主体で開発する国際協力機器です。「はやぶさ2」のミッション機器としては大型の部類ではありますが、この中に4台の科学観測機器が所狭しと詰め込まれています。初代「はやぶさ」と同様に「はやぶさ2」でも、探査機からのリモート観測による小惑星のグローバルな特徴の把握と着陸地点の選定、地球に持ち帰った小惑星サンプルの最新・高性能の装置を使用したミクロで高精度な分析を行います。それに加えて、MASCOTによる小惑星表層の物質や物性のその場観測によって、グローバルなリモート観測とミクロなサンプル分析をつなぎます。
MASCOTの三大目的は、小惑星上での科学(Science)、着陸候補地点の表層状態の偵察(Scouting)、サンプル採取地点の鉱物の産状把握(Context)です。限られたリソース、“超”短期開発が要求される中で、何度かの変遷を経て、MASCOTに搭載される4機器が選定されました。赤外分光顕微鏡(MicrOmega)、広視野カメラ(CAM)、熱放射計(MARA)、磁力計(MAG)です。MicrOmegaは0.9~3.5μmに波長を持つ赤外分光顕微鏡で、解像度20μmで鉱物の種類、水や有機物との相互作用の特徴を調べる主力機器です。CAMは、MASCOTの足元の表層土壌の観察から周辺地形や地質構造を観測する広角カメラです。夜間には4色の発光ダイオードを順に照らすことによってカラー撮像も行います。MARAはCAMの表層状態の観察と同じ領域に視野を持ち、異なる波長帯の6個のサーモパイル式熱放射計で表層温度や熱物性を調べるほか、物質の違いも調べます。MAGは3成分フラックスゲート磁力計で、小惑星の広域の磁化の特徴を調べます。MicrOmega、CAM、 MARAは「はやぶさ2」リモート観測機器の近赤外線分光計(NIRS3)、光学航法カメラ(ONC)、中間赤外カメラ(TIR)と対応しており、マルチスケールでの観測に適しています。
MASCOTの検討は、ESA(欧州宇宙機関)が公募するコズミックビジョンに日欧協働で提案(結果は非採択)した小惑星探査機マルコポーロ用着陸機として始まりました。今年8月にチュリュモフ・ゲラシメンコ彗星に到着したロゼッタ探査機に搭載され、11月に着陸する100kg級着陸機フィラエの小型版でした。その後、日欧協働の継承の証しとして「はやぶさ2」に搭載することになりましたが、10kg級が限界でした。MASCOTは30cm角で厚さ20cmの直方体をした着陸機本体と、探査機側に残る保持機構で構成されます。低密度で高強度な炭素繊維強化プラスチック(CFRP)の骨組みに搭載機器がくくり付けられたような構造であり、総重量に対する観測機器の割合が30%に達する高い搭載効率を実現しています。
MASCOTは、小惑星の高度約100mで「はやぶさ2」から投下され、自由落下によって小惑星表面に着地、何度かバウンドして静止します。それ以後は自律運用をスタートします。太陽センサ(太陽電池)と接地センサ(レーザ短距離計)のセットが直方体の各面にあり、それらを用いて自己姿勢を検知し、「正しい姿勢」に起き直って小惑星表面での観測シーケンスを開始します。取得したデータは母船経由(表面探査小型ローバMINERVA-Ⅱ用通信系を共有)で地球まで届けます。一連の観測運用が終了すると、最大200mの跳躍力を活かしたホッピングで別の地質構造まで移動し、そこで再び一連の観測シーケンスを行います。起き直りとホッピングは、内部搭載の重り付きアームを回転させることで発生するトルクの反作用によって行います。MASCOTの電源はリチウム一次電池であり、寿命は小惑星日(7.6時間)でわずか2日分と短命ですが、木星探査機ガリレオの大気プローブ(1時間未満)、土星探査機カッシーニから分離されたタイタン着陸機ホイヘンス(3時間)に比べると長寿命です。
MASCOTのフライトモデルが6月後半になってついに相模原に搬入されました。ドイツ・フランスの開発メンバーに加え、通信機提供を含めた日本側の関係者の皆さまのご協力のたまものです。ここに感謝を述べさせていただきたいと思います。小惑星表面で活動する本番まではまだ長い道のりが続きます。

| 図1 | MASCOT内部の観測機器(提供:DLR) |
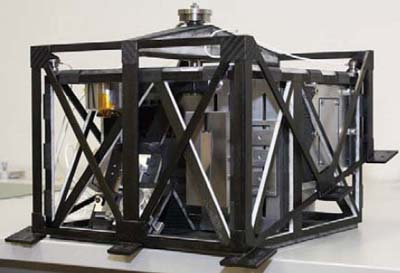
| 図2 | MASCOTの構造(提供:DLR) |
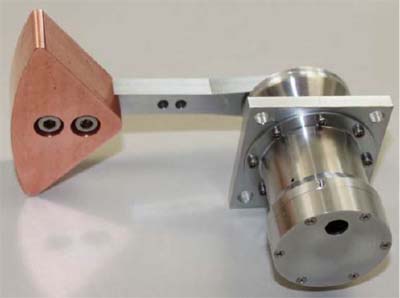
| 図3 | 重り付きの回転アーム(提供:DLR) |
(おかだ・たつあき)