
航法誘導制御
「はやぶさ2」でも「はやぶさ」と同様、小惑星到達後に接近、近傍観測、タッチダウン、小惑星表面物質の採取を予定しています。今回は初号機での経験と、滞在時間が初号機の3ヶ月に比べて1.5年と長いことから、小惑星近傍での航法誘導制御も余裕を持って対応したいところですが、以下のような課題が少なからず存在します。
●目標とする小惑星1999JU3の情報は地上からの観測によってある程度推定可能だが、その3次元形状、姿勢運動のスピン軸・スピン周期、表面反射率、重力に関する不確定性は高く、イトカワの場合とは異なる戦略を強いられる可能性がある。●新たに衝突装置(SCI)と呼ばれる機器で小惑星表面にクレータをつくるという運用が追加され(第4回「衝突装置」参照)、小惑星表面近くでの衝突装置放出→爆発→衝突までの間に、衝突体が破壊される際の破片、および衝突の際に発生する小惑星自体の破片や小片から探査機を守るために急いで安全な場所(小惑星の裏)に退避させる必要がある(図1)。
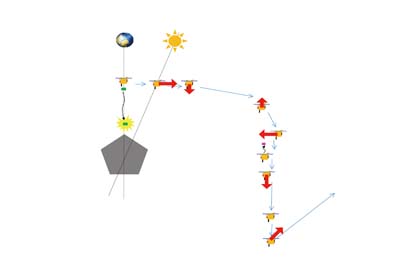
| 図1 | 衝突装置分離とその後の退避マヌーバ |
航法誘導制御系が使用する機器は初号機の設計を引き継いでいますが、信頼性向上のため、搭載計算機(AOCP)が待機冗長構成、航法画像処理制御計算機(ONC-E)がミッション系制御計算機(DE)と機能冗長構成になっています。また、恒星センサ(STT)の台数が1から2へ、リアクションホイール(RW)の台数がX、Y、Z軸に各1個の計3個から、X、Y軸に各1個、Z軸に2個の計4個に増加しています。初号機での経験を踏まえ、リアクションホイールの延命のため小惑星往復のフェーズではZ軸ホイール1個のみを一定の回転角速度で回すバイアスモーメンタムとし、化学推進スラスタとイオンエンジンの推力方向を変更させるジンバルを駆使して姿勢を制御する予定です。
小惑星への接近、降下、タッチダウンの方法は初号機のやり方を踏襲しています。図2に示す高度約40m以上の「接近フェーズ」において、縦方向(高度方向)位置はレーザ高度計(LIDAR)の距離計測値を用いた搭載計算機による自動制御を行う予定です。横方向(小惑星─地球を結ぶ直線に対し直交する方向)位置の計測と制御に関しては、次の作業を地上オペレータが行います。
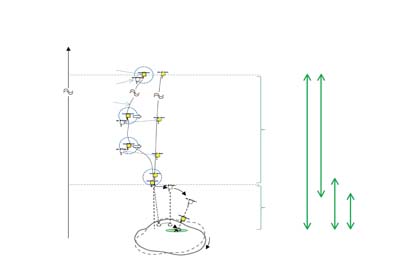
| 図2 | タッチダウンシーケンス概念図 |
②3次元形状モデルの表面に小惑星表面の岩やクレータといった視覚的に目立つ特徴点を配置した「3次元特徴点地図」を作成。さらに、「3次元特徴点地図」を2次元射影して「2次元特徴点地図」を作成。
③実際の運用では、探査機から送られてくるONC-W1画像中の特徴点と「2次元特徴点地図」の特徴点とをPCのウインドウ上で重ね合わせて、小惑星との相対位置を求める。
まさに初号機で培われた“匠”を組み込んだ人海戦術です。計測結果に基づき、画像(探査機→地球)とコマンド(地球→探査機)の伝送時間(片道約20分)を考慮に入れた軌道修正用スラスタ噴射コマンドを探査機に送信する誘導を行うことで、予定の軌道に沿って一定速度で小惑星に近づいていきます。
接近フェーズの終端で高度が低下するに従って、通信時間遅れが長い地上からの指令に基づく誘導では対応しきれなくなってきます。そのため図2の高度約40m以下の「最終降下フェーズ」においては、初号機同様、制御方式を自動に切り替え、次のように運用する予定です。
①ターゲットマーカ(TM)と呼ばれる、道路標識に似た反射特性を持つ素材で覆われたバウンドしにくい玉を小惑星表面に投下。②ストロボ照射で光るTMのONC-W1画像を搭載計算機で処理して、TMの画像内位置を計算。
③4本のレーザビームを照射して小惑星表面の4点までの距離を計測するレーザレンジファインダ(LRF)出力と②の結果を用いて、TMとの相対位置と小惑星表面との相対姿勢を計測。
④上記計測量を用いた自律画像航法誘導制御により、小惑星表面に姿勢を合わせながら降下することでタッチダウン、小惑星表面物質を採取して上昇。
(てるい・ふゆと)