月面で小型月着陸実証機(SLIM)の撮影に成功
クレジット:JAXA、タカラトミー、ソニーグループ(株)、同志社大学
月面で小型月着陸実証機(SLIM)の撮影に成功
ボーダレスなチームで挑んだ、
世界最小・最軽量*の変形型月面ロボット、
LEV-2(愛称:SORA-Q)開発
*JAXA調べ2024年1月25日時点。
2024年1月に月面着陸し、月面観測を遂行した小型月着陸実証機(SLIM)。
このSLIMの月面での姿を撮影したのが、世界最小・最軽量の変形型月面ロボットLEV-2だ。
直径約80mmの小さなLEV-2にはどのような技術がつまっているのか。
このミッションに携わった平野 大地、稲澤 真里子、須藤 真琢に話を聞いた。
「民間企業・大学との共同研究」×「JAXAの部門横断」で誕生した
LEV-2(SORA-Q ・ソラキュー)
2024年初めに日本初の月面着陸に成功し、月面観測によって多くの貴重なデータを地球に届けた小型月着陸実証機(SLIM)。このSLIMには2つの小型探査機、LEV-1とLEV-2が搭載されていた。LEV-1はホッピング移動や地上への通信を行う機能等を持ち、LEV-2は搭載する2つの可視光カメラで周辺を撮影する機能を持つ。今回のミッションでは、この2機が月面で通信し、LEV-2が撮影した写真データをLEV-1が地球に送り届けることに成功した。
「LEV-2は直径約80mm、質量約228gという手のひらサイズのロボットです。今回のミッションの目標は、月面で超小型ロボットの探査技術を実証すること。そのなかで、SLIMに搭載して月へ行くことをミニマムサクセスに、月面で周辺を撮影することをフルサクセスとし、月面を移動してSLIMの着陸状況および着陸地点周辺の情報を取得することをエクストラサクセスに掲げていました」
開発リーダーを担った平野はそう語り、今回、エクストラサクセスを達成したLEV-2の活躍を振り返った。
「LEV-2開発のきっかけは、宇宙探査イノベーションハブ(以下、探査ハブ)で実施した第1回研究提案募集(RFP)です。ここで『小型ロボットに関する研究提案』を募集したところ、おもちゃ製作の技術・ノウハウを持つ株式会社タカラトミーさんからの提案があり、共同開発がスタートしました」
2016年からスタートした共同研究には、2019年にソニーグループ株式会社、2021年に同志社大学が新たに参加。そしてJAXAからは探査ハブ、研究開発部門などからメンバーが集まり、産学官や部門などの枠を超えたチームでの開発が進められた。
「探査ハブでは、研究公募の下、さまざまな企業や研究機関との共同研究を実施しています。この新しい枠組みによって、民間企業などの持つ地上技術とJAXAの有する宇宙技術に関わる知見を融合させることができました」
今回、探査ハブからLEV-2ミッションに参加し、主にLEV-2の機体開発や月面における挙動解析などを担当した須藤はこう語った。そしてこの成功は「さまざまな異分野の人材・知識を集めたチーム」だからこそ達成できたことだと説明した。
また、2021年からこのミッションに参加し、LEV-2のソフトウェア開発を担当した稲澤は、「私が参加したときには、すでにLEV-2の機体はほぼ出来上がっていました。LEV-2は地上からの指示を受けて動くのではなく、自分で考えて動く"自律制御型のロボット"をめざしていたため、私たちはそれを実現できるソフトウェアの開発に取り組みました」と語った。
開発を始めて以降、研究開発部門は、各種試験や解析において設備を提供するとともに、各領域のエキスパートが技術的なアドバイス・レビューを実施。集まったチームメンバーがそれぞれの役割を果たし、協力しあってこのミッションに取り組んだ。
その結果、LEV-2は、LEV-1とともに、「日本初の月面探査ロボット」「 世界初の完全自律ロボットによる月面探査」「 世界初の複数ロボットによる同時月面探査」「世界初の月面ロボット間通信」を達成、LEV-2はこれに加えて「世界最小・最軽量の月面探査ロボット」となったのだ。
LEV-2が月で正常に作動。
「信じた道は正しかった」と実感できた
ところで3人は、LEV-2が月面に着陸する瞬間をどう迎えていたのだろうか。
「LEV-1とLEV-2は、SLIMの月面着陸の直前に放出される予定でした。その瞬間はといえば、私と須藤さんは、それぞれ臼田と内之浦の宇宙空間観測所でLEV-1から送られてくる電波受信作業に参加していて、3人とも別々の場所でSLIMの月面着陸の様子を見ていましたね。着陸後、入ってくる情報やデータをもとに、LEV-2が正常に作動しているか、期待した成果を出せるのか固唾をのんで見守っていました」
そう語る平野は、数日後にLEV-1を通してLEV-2から送られてきたデータの画像を見て「LEV-2が正常に動いている! 自分たちがやってきたことは正しかった!」とようやく確信したのだと言う。稲澤もその時の心境を語った。
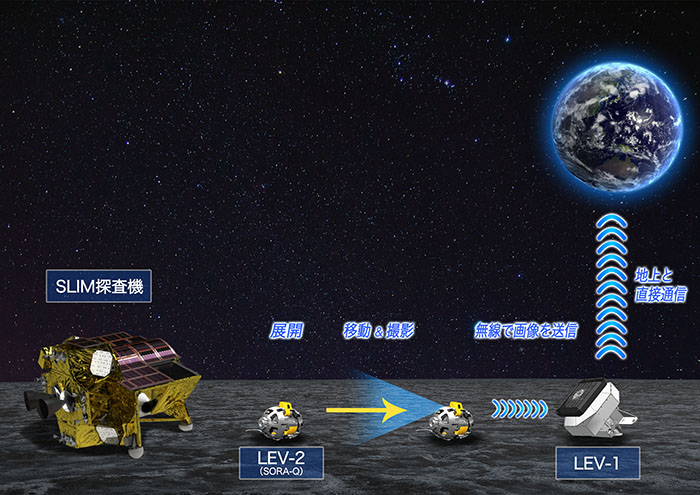
SLIM、LEV-1、LEV-2の月面での活動イメージ クレジット:JAXA/タカラトミー/ソニーグループ(株)/同志社大学

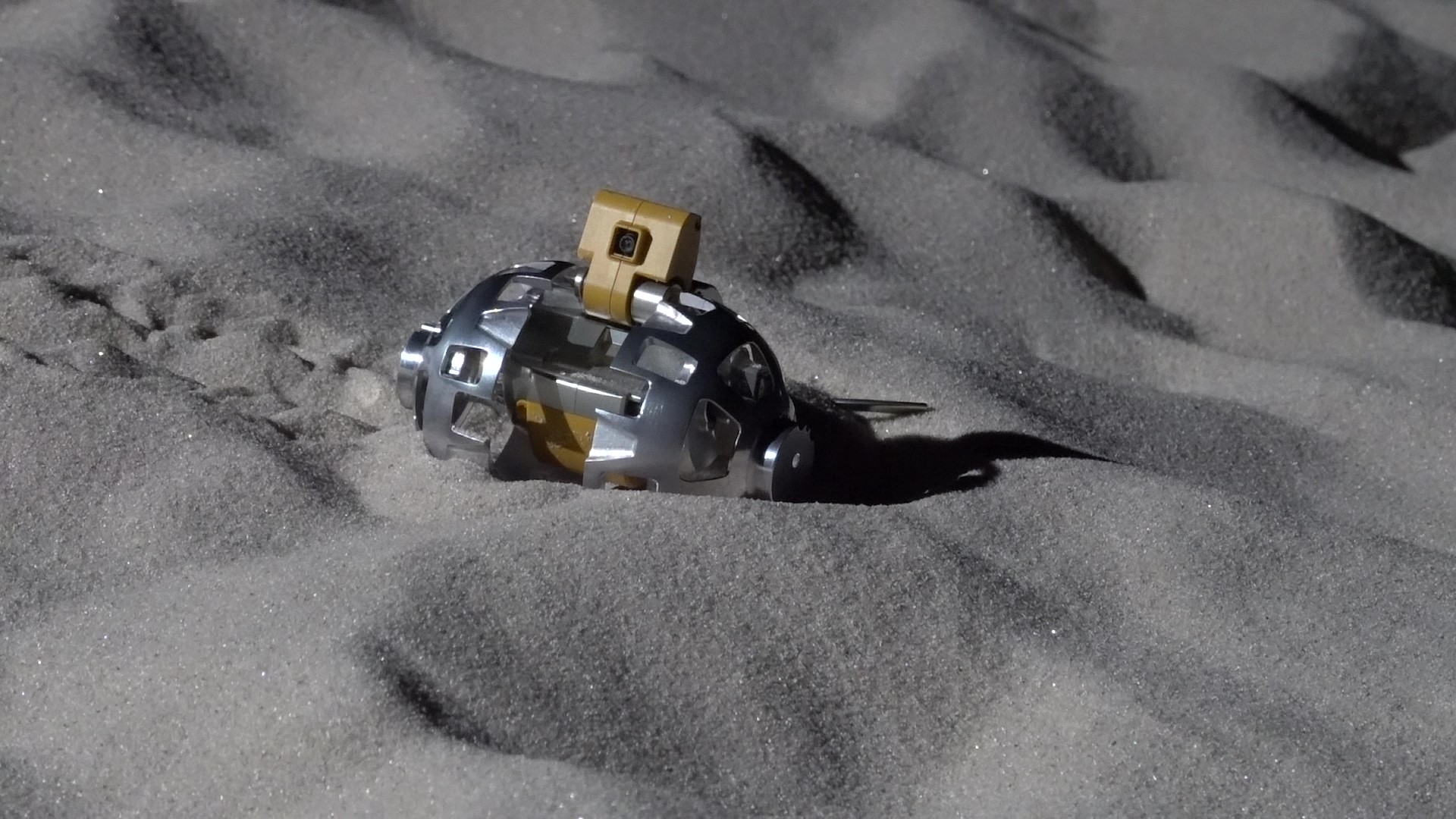
実際にLEV-2が撮影した月面画像(フロントカメラでSLIM探査機を撮影、LEV-1がデータを受信し、地上へ送信)
「月面でSLIMを撮影して画像を送信するミッションを、自律で見事にこなしてくれたLEV-2のことを誇らしく思いました。設計、実装、検証を何度も繰り返してきたLEV-2の機能が、月面でも上手く働いたことを示す画像が見られて、本当にうれしかったです」
この言葉に大きく頷きつつ、須藤も「長い間、JAXAで月面ローバの研究開発に携わってきた経験が、LEV-2 の月面でのミッション達成につながり、うれしく思いました」と語った。
とはいえ、平野には「悔しさ」もあった。
「協力してもらった関係者にも良い報告ができてホッとした反面、データ欠損が出たり、画像の画質が期待していたより悪かったりと、エンジニアとしては悔しい部分もあって。まだまだ改善すべき点があることを、次への足掛かりにしたいですね」
困難を乗り越え、ミッションを成功に導いた技術の数々
今回のLEV-2ミッションには、共同研究者たちの持つ、さまざまな技術が活かされた。
例えば、タカラトミーの玩具技術は、LEV-2の変形機構・設計技術に活かされ、「小型軽量化と走行性能向上」に大きく貢献したと平野は語る。

LEV-2(月面環境を再現したJAXA相模原キャンパス宇宙探査実験棟でのプロモーション画像)
クレジット:JAXA/タカラトミー/ソニーグループ(株)/同志社大学
「LEV-2は野球ボール程度の小さなロボットです。これが月面で変形して車輪を展開し、月の砂(レゴリス)の上を走行していきます。ウミガメの動きを参考にしたという独特の走行方法(クロール走行)は、玩具メーカならではのユニークな発想ですよね。このおかげで走行の安定性を向上させることができました」
また、ソニーグループの最先端IoTデバイス・画像処理技術は、LEV-2の小型・低消費電力化と高機能化を実現させた。
「LEV-2は完全自律型ロボットなので、地上からの指示を受けず、月面で自らSLIMを探します。そして写真撮影を行うのですが、通信量の制約から地球に送信できる画像は多くても2、3枚だけです。つまり、確実にSLIMを見つけ、さらに適切な構図でSLIMを捉えた写真を選んで送信することが必要で、ソニーグループさんの持つ画像処理技術などがこれを可能にしてくれました」
そのほかにも、さまざまな困難を乗り越えてきたLEV-2。須藤はそのひとつである「振動試験」でのエピソードを語った。
「振動試験とは、ロケットの打上げ時の振動にLEV-2が耐えられるのかを確認するテストです。打上げの際に、LEV-2は円筒のケースに収納されているのですが、試験時にケースとLEV-2の間で想定以上の力が発生して、LEV-2の起動スイッチがつぶれてしまったことがありました。これを解決するために、タカラトミーさんとLEV-2の構体の設計を何度もやり直し、試験を繰り返して、不具合が発生しない形状にたどり着きました」
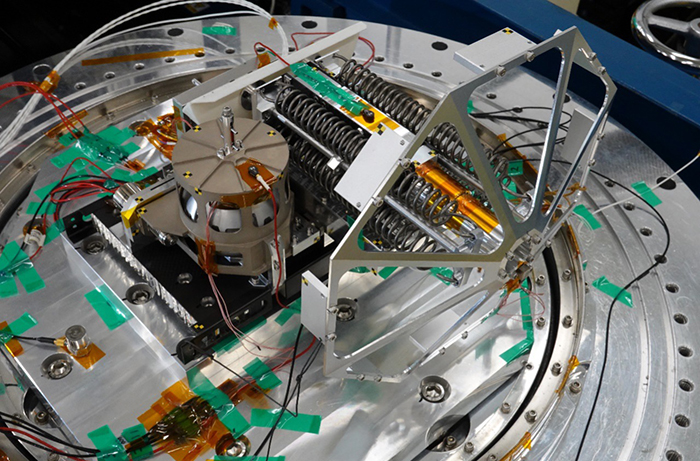
「振動試験」の様子。写真中央左側の円筒ケースにLEV-2は収納されている。この形態で、LEV-2はSLIMに搭載して打ち上げられた
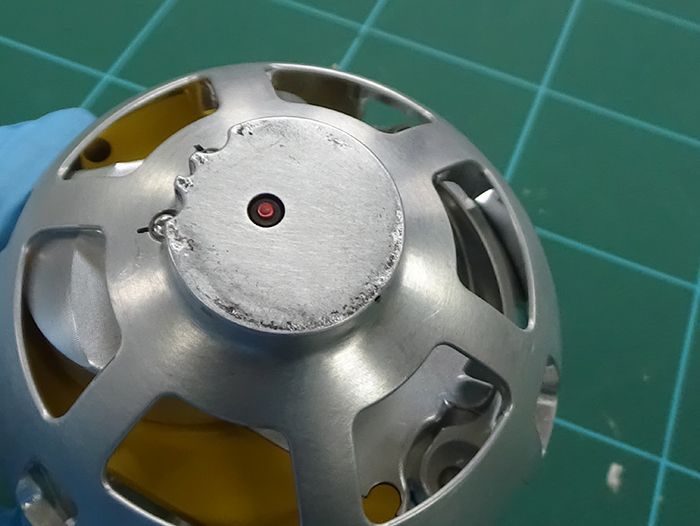
初期の振動試験の後に撮影したLEV-2 の車輪側面の写真。
LEV-2の起動スイッチ(赤い部分)がつぶれてしまっている
また、LEV-2のミッションの成功は、打上げに関わるメンバーの尽力もあってのことだと稲澤は語る。
「LEV-2が搭載されたH-IIAロケット47号機においては、悪天候により直前で打上げが中止になり、準備作業がやり直しになるなど、打上げの大変さを改めて実感しました。打上げに関わるメンバーの尽力のおかげで種子島から宇宙へとLEV-2を送り出すことができ、大変感謝しています」
「子どもたちがワクワクできる」宇宙開発をしていきたい
今回、LEV-2のミッションで獲得した技術や知識、ノウハウは、「将来の月面ミッションに活用していけるはず」と平野は言う。
「月面でのミッションを成功させるための試験方法やノウハウ、そしてロボットの自律制御技術は、今後、高度化する月面ミッションに必要な技術です。月面探査はもちろんですが、月面基地を建てる場面などにも活かされる技術になるだろうと考えています」
さらに稲澤は今回の経験を経て、「さらに大きく高機能なロボットを宇宙に送り、未知の地を探査させたい」という気持ちが高まったと語る。
「LEV-2は走行する姿が可愛らしいだけでなく、小さくても立派な宇宙ロボットとしての魅力を持っています。そしてその魅力は、今はタカラトミーさんの発売された1/1スケールモデルのおもちゃなどを通じて、たくさんの人に伝わっています。今後はさらに高機能で、かつ、LEV-2のように子どもたちに愛されるロボットを作って、月や火星などで活躍させたいです」
また須藤も月探査への思いが、これまで以上に強くなっていると言い、「現在取り組んでいる月の南極で水を探す月極域探査機プロジェクト(LUPEX)では、228gのLEV-2の約1500倍、350kgのローバを月に送り込もうとしています。今回の経験をもとに技術開発を進め、ぜひ月で水を見つけたいですね」と意気込んだ。
そして最後に、今後の宇宙探査について、平野はこう語った。
「今回のLEV-2の成果は、民間企業・研究機関との共同研究があったからこそ、実現できました。このミッションを通じて、さまざまな業界の方が宇宙事業への参画に興味を持ち、宇宙業界以外の技術を、宇宙探査に活かしていく社会的な流れを作っていければうれしいです。そして一緒に宇宙開発、宇宙ビジネスを活性化できればと思っています。
今回のミッションでは、LEV-2の活躍に多くの子どもたちがワクワクしてくれていて、本当にうれしく感じました。今後も、子どもたちを含め、たくさんの人の好奇心を掻き立て、宇宙に興味を持ってもらえるような成果を宇宙開発で出していければと思っています」
Profile

研究開発部門 (宇宙探査イノベーションハブ併任)
主任研究開発員
平野 大地(ひらの だいち)
長野県出身。ドイツ航空宇宙センター(DLR)勤務を経て、JAXAに入社し、宇宙ロボットの研究開発に携わる。SLIMミッションでは変形型月面ロボット(LEV-2)の開発主担当として、プロジェクト管理などを担当。趣味は、サッカー、旅行。好きなロボットはR2-D2、ドラえもん。最近は育児と仕事の両立に悪戦苦闘中。

研究開発部門 第二研究ユニット
研究開発員
稲澤 真里子(いなざわ まりこ)
兵庫県出身。SLIMミッションでは、LEV-2のソフトウェア開発を担当。有人支援ロボットの研究開発、デブリ除去技術の研究開発やプロジェクトなど、ロボットの制御技術に関わる研究開発に携わる。趣味は音楽鑑賞、ギター演奏。

宇宙探査イノベーションハブ
(有人宇宙技術部門 月極域探査機プロジェクトチーム併任)
主任研究開発員
須藤 真琢(すとう まさたく)
宮城県出身。月面ローバの制御技術、月面基地を作るための建設機械の遠隔操作や自動運転など、自動化・自律化の研究に従事。2021年より月の水資源調査を目的とする月極域探査機プロジェクト「LUPEX」にて、ローバシステムの研究開発に携わる。SLIMミッションでは、主にLEV-2の機体開発や月面における挙動解析などを担当。趣味はランニングや登山。
取材・⽂︓笠井美春 編集︓武藤晶⼦
著作権表記のない画像は全て©JAXAです。