軌道設計が導く宇宙の旅
軌道設計が導く宇宙の旅
火星の衛星、月、小惑星。より深く宇宙を理解するため、JAXAは宇宙探査に挑んでいる。そこで最初に必要になるのが「軌道設計」だ。目標となる天体への道筋を、数式やプログラミングによって導き出す。天体の重力が影響し合う宇宙空間のなかで科学的要求や技術的な条件を満たす、3つのプロジェクトの軌道。そこから見つめる、研究者たちの意図や思い。
軌道設計を行う上で欠かせない、
ニュートン運動方程式「F=ma」
「目標天体に到着する」とは探査機と天体の位置を合わせ、適切な速度にするということ。各天体の重力や太陽光からの圧力などから探査機が受ける力(F)と探査機の質量(m)から加速度(a)を求め、それを積分することで探査機の位置と速度を求める。必要となる速度変化を計算しつつ、探査機の性能や打ち上げ時期等が検討され、具体的な軌道は決まっていく。
【火星衛星フォボスへ】
地球―火星間の往復。
重力の小さな火星の衛星への旅路。
地球に月があるように、火星には二つの衛星が存在する。そのうちのひとつが火星衛星探査計画MMXの着陸目標天体で、火星のより近くをまわる衛星「フォボス」だ。フォボスには、隕石が火星に衝突した時に吹き飛ばされた火星表面の 鉱物や岩石が、多く降り積もっていると考えられている。つまりフォボスの試料を持ち帰ることができれば、フォボスだけでなく火星の試料も得ることができるのだ。
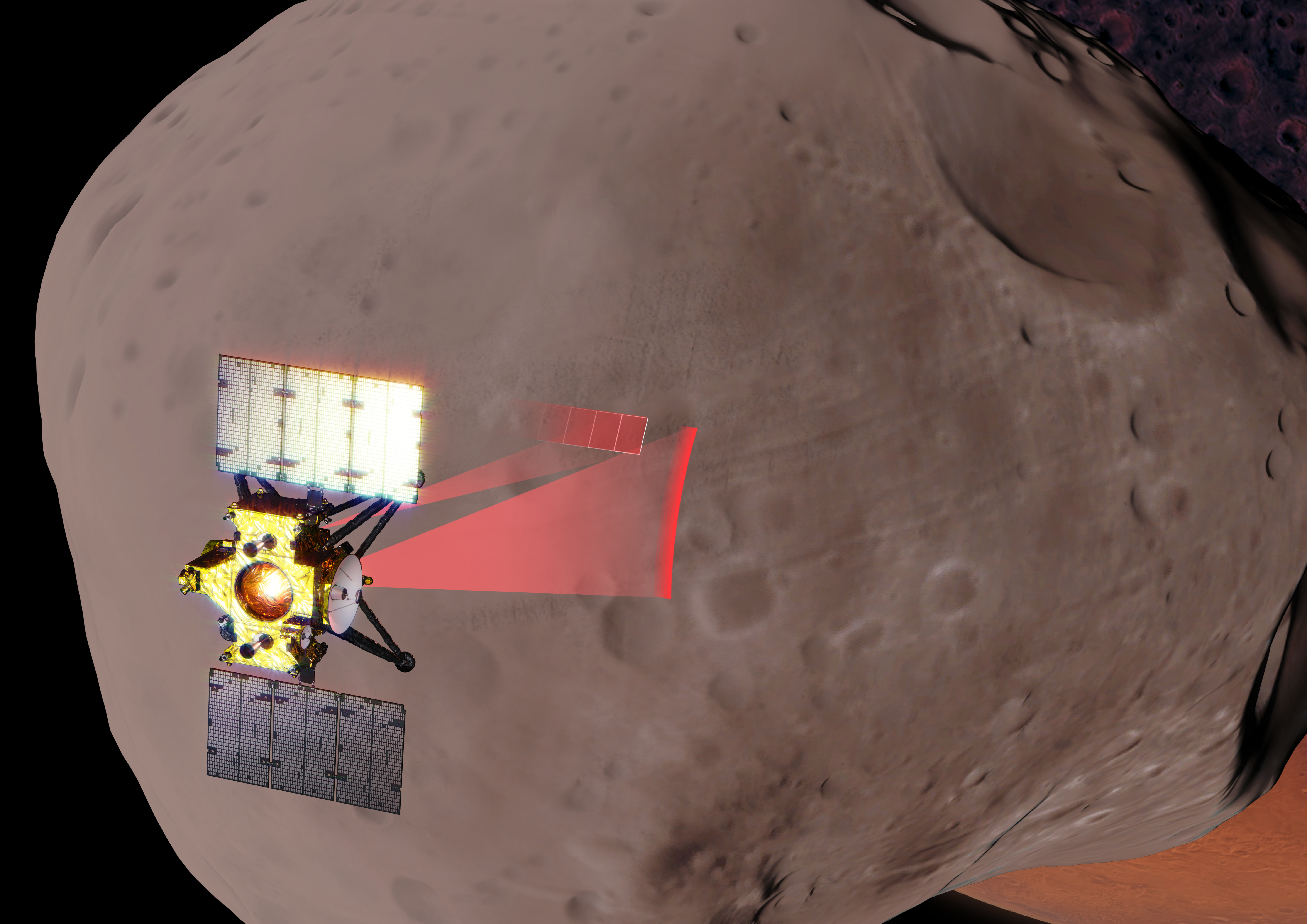
フォボス軌道上高度40kmからの観測の様子(想像図)。
JAXAでは火星の周回軌道に探査機を投入することや、月以外の衛星を探査することも今回が初となるが、「目標天体がフォボスであるということに、軌道設計の難しさがあります」と、担当した池田人は語る。「例えば地球の衛星である月には、月を中心として探査機が安定してまわれる軌道があります。月の観測を行うには、そこに探査機を投入すればいい。しかしフォボスにはそういった軌道がありません。フォボスの重力が弱いため、探査機は火星の重力に支配されてしまいます。MMXは地球を出発すると、惑星間を航行する軌道を経て、火星をまわる軌道に入ります(❶)。そこから、フォボスを周回する軌道に入ることができないので、火星をフォボスとともに周回するように調整を行います(❷)。そうすることで、フォボスを赤道面付近の全方向から観測します。同じ軌道上にいながら目標天体を擬似的に周回する特殊な例で、擬周回軌道(QSO)と呼ばれています。QSOでの運用期間中には、燃料を噴射することで軌道を変更し、フォボスとの距離を近づけたり遠ざけたり、あるいは探査機の向きを変化させたりすることで、フォボス表面の広範囲な観測を実現します」
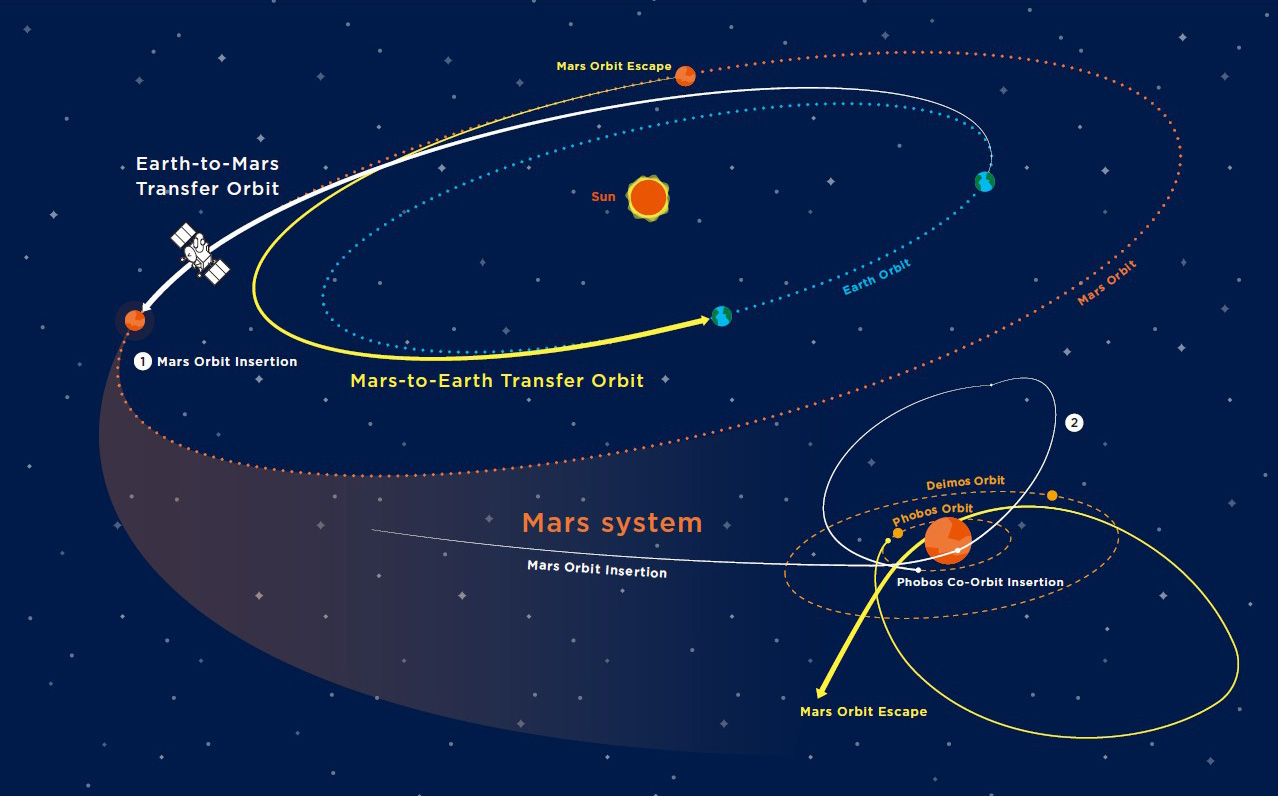
MMXの軌道図。
池田は探査機が打ち上げられた後、探査機がどこをどのように航行しているのかを求める「軌道決定」も担う。地上からの電波計測や探査機に搭載されたカメラ、レーザー高度計などによって得られるデータを元に、探査機が運動した軌道を求め、もし予定していた軌道からずれていた場合には修正を行う。「軌道は、実際に宇宙空間で運用してみると、計画からのずれがあります。試算を念入りに重ねても、いろいろな誤差(モデルの誤差、軌道制御時の誤差など)の影響で当初の設計からずれてしまいます。実際に運用し、そこから得られる、自然や物理現象と対峙している実感は、私のやりがいにもつながっています。またMMXはフォボスを本格的に探査する初めての探査機となるので、これまでに海外機関の実施した探査ミッションで得られた情報とは異なる様々なデータが得られるでしょう。探査機の軌道はフォボスの影響も受けますので、探査機の軌道を精密に推定することを通して、フォボスの情報(重力や位置など)を導くことができると考えています。
私にとって『よい軌道』とは、探査機が安全に運用できる軌道です。2024年度に打ち上げられ、2029年度(いずれも予定)に帰還するMMXが、最後まで旅路を全うできるよう支えていきたいと思います」
火星衛星探査計画MMX 火星にある二つの衛星「フォボス」と「ダイモス」の観測、さらにフォボスへ着陸し、試料を地球に持ち帰る世界初のミッション。試料からはフォボスや火星の起源、さらに太陽系惑星の進化プロセス解明の鍵まで得ることが期待される。2024年度打ち上げ予定。
【月へ】
あえて遠回りする航行で、自然の物理法則を活用する。
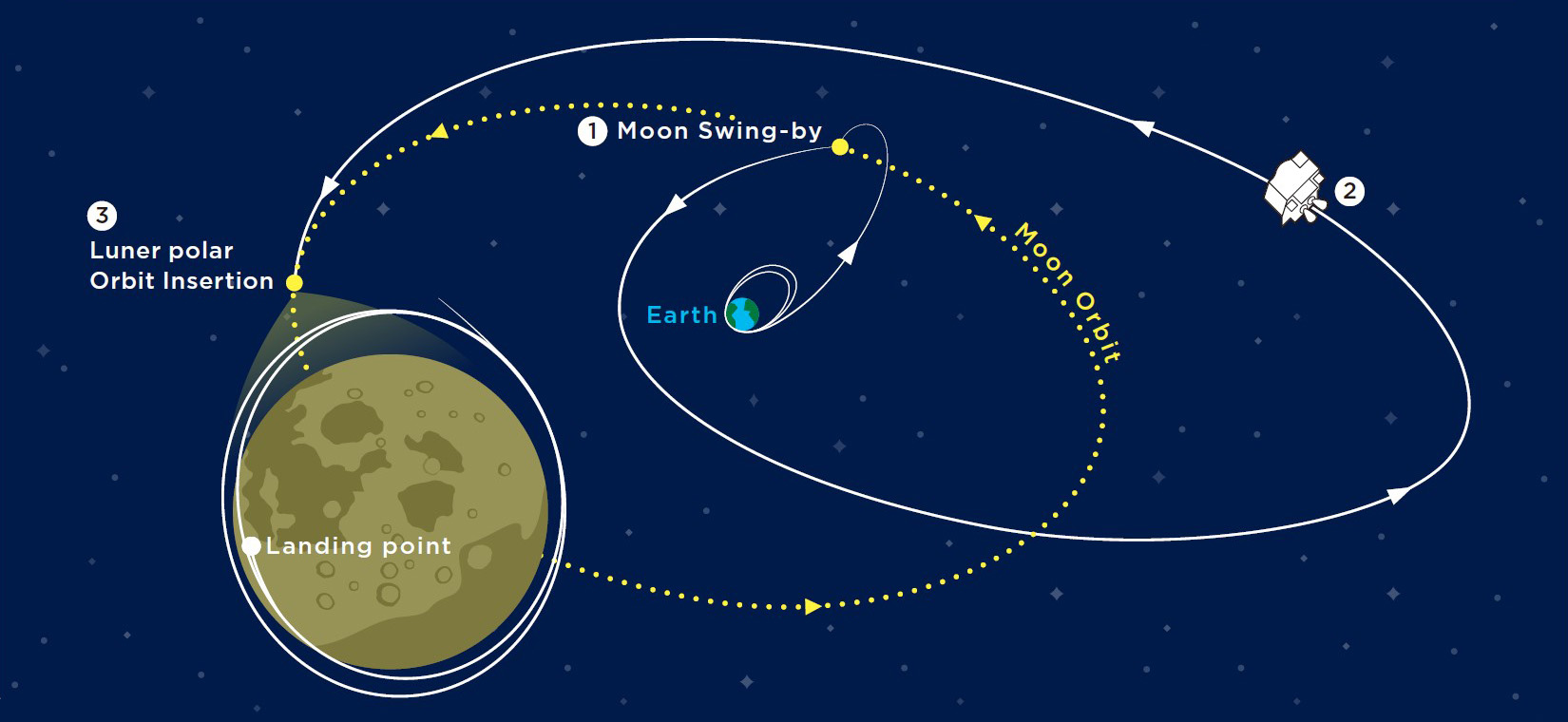
月惑星探査は「降りやすいところに降りる」から「降りたいところに降りる」へと変化しようとしている。SLIMは第一歩として、月面への高精度なピンポイント着陸を試みる。月到達までの軌道設計を担当する杉本理英は、月惑星探査ミッションを「探検」だと表現する。「限られたリソースのなかで未開発の場所に行き、探索するのが月惑星探査ミッション。その道筋を描き、探検を実現させるのが軌道設計です」
SLIMで設計されたのは、月に一直線に向かうのではなく、月軌道の外側を遠回りするという軌道だ。「SLIMでは太陽の重力と月の重力、それぞれを有効活用することで月軌道に到達します。まず地球から月付近まで向かい、月の重力を活用してスイングバイ(*1)。月軌道の外側にSLIMを飛ばします(❶)。月軌道の外側では太陽の重力を大きく受けるのでその力に引っ張ってもらい、どんどん軌道を膨らませる(❷)。そして月と再会時の速度差を小さくすることで、エネルギーを節約して月軌道への投入を試みる(❸)。できるだけ自然の物理を利用し、消費する燃料をできるだけ少なくしています」
SLIMの軌道図。
月軌道に辿り着くと、次に求められるのは精度の高い着陸だ。アポロ計画等の月着陸の精度は目標地点から数km~10数kmだったが、SLIMでは、目標地点100m以内に着陸することを目指す。そのプロセスを、着陸降下軌道をふくむ軌道設計全体を取りまとめる植田聡史が説明する。「ピンポイント着陸では、月上空で探査機自身が自分の位置や向きを正確に把握する必要があります。しかし月にはカーナビもグーグルマップもありません。そこで取り入れたのは、月面の写真を撮り、そこに写るクレータから位置を見出す手法です。クレータは過去の観測から月面上の位置が判明しているので、そのデータと照合し探査機の位置を推定します。そこから最適なルートを計算し、着陸するのです」

月に着陸するSLIM(想像図)。
植田は続ける。「SLIMは、月面への高精度着陸技術を小型探査機で実証することをミッションとしています。しかしそれを満たしていたとしても、到着まであまりに時間がかかったり、着陸降下のための燃料が足りなくなったりすると、その軌道は使えません。一度遠回りをする軌道が、許容範囲かどうか見極めるのも軌道設計の役割なんです。私たちは月への探検を生身で感じることはできませんが、SLIMから受け取るデータや月面写真から、その感動をともにしたいと思っています」
(*1)スイングバイ...天体の重力を使って軌道を曲げる(進行方向を変える)こと。
小型月着陸実証機SLIM SLIMは、将来の月惑星探査に必要な目標地点へのピンポイント着陸を小型探査機で実証するプロジェクト。2023年9月7日、H-ⅡAロケット47号機で打ち上げられた。月のクレータの斜面に100m以内の精度で着陸し、月内部から噴出したと考えられる岩石を観測するミッションなどを行う。
【小惑星1998 KY26/2001 CC21へ】
二つの小惑星に向かえば、より面白い。
拡張ミッションならではの挑戦を実現する。

小惑星探査機「はやぶさ2」が落としたカプセルが、流れ星のように大気圏に突入し地球に帰還。このとき、「はやぶさ2#」の旅が再び始まった。
小惑星探査機「はやぶさ2」は小惑星リュウグウの試料を地球に届けた後も航行を続け、「はやぶさ2#(シャープ)」として次の天体に向かっている。「はやぶさ2#」で求められたのは、残された燃料のなかで、リュウグウ以外の天体にランデブー(*2)すること。その軌道設計は、向かう天体を決めるところから始まった。「軌道は、いきなり一本の線を導けるわけではありません。まず軌道の大枠を見出すため、『ランベール問題』という太陽と地球の重力のみを考慮する簡易な式を用いました。その後、徐々に複雑な計算を行うことで、軌道の成立性を確認していきました」と、軌道設計を担う佐伯孝尚は語る。「正確な軌道設計には、探査機の質量や燃料の量などを考慮する必要がありますが、初期の段階では燃料の制約はなく、一瞬で速度を変化できる前提に立って計算をします。ある程度、天体の候補が絞られたところで、『はやぶさ2#』の実際のエンジンの性能や残りの燃料を加味して再度計算するんです」。いくつかの解からさまざまなトレードオフを経て、最終的に採用されたのが、直径約30m程度の小惑星1998
KY26だ。
「目標が決まった後、せっかくならもう1つ天体に立ち寄ろう、と2つ目の天体の検討が始まりました。目標への軌道をよぎり、フライバイ(*3)できそうな天体を探していく。そうして、小惑星1998
KY26よりも内側を公転する小惑星2001
CC21に狙いが定まっていきました」。この軌道設計には、拡張ミッションだからこその難しさもあった。「通常は探査機をロケットで飛ばして適切なタイミングで軌道に入れるわけですが、今回は『はやぶさ2』がカプセルを分離した後に地球を脱出する軌道が初期値となるわけです。地球出発のタイミングと軌道を自由に選べないため、すぐに1998
KY26に向けて出発できるわけではなく、同じ軌道を長期間航行することで地球スイングバイをすることになりました」。最終的に「はやぶさ2#」は、まず太陽の周りを6周半まわったのち、2026年に2001
CC21をフライバイ(❶)。その後、太陽の周りを1周半してから地球スイングバイ(❷)。さらに太陽の周りを半周したのちに地球スイングバイをもう一度する(❸)ことで、ようやく1998
KY26に到達する(❹)。実に10年半もの時間をかけて、ようやく目標にたどり着くのである。
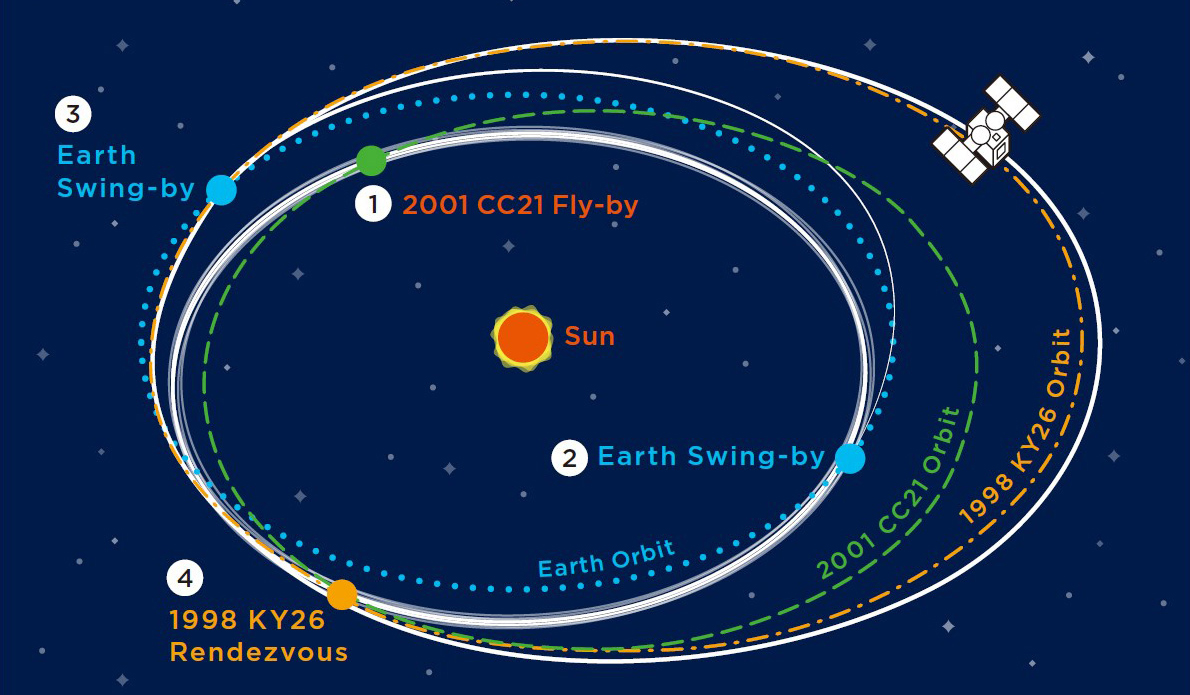
「はやぶさ2#」の軌道図。
軌道設計において人間の感覚は、軌道の妥当性の判断に出る、と佐伯は言う。「たとえば初期の段階で目標天体がなかなか見つからないとき、出発を半年遅らせることで選択肢は広がるのではないか?と考え直し、地球スイングバイを1回追加してまた計算をしました。そうすることで、選択肢がぐんと広がったのですが、このように軌道の経路を変更するようなことは軌道設計者が経験に基づいて行う必要があります。また、『はやぶさ2#』では立ち寄る小惑星が追加されたことで、フライバイ後の地球スイングバイの難易度がやや上がっています。軌道としては成立したが本当に実際の運用できるか。チャレンジ精神と実現可能性のその按配を判断する。そこに軌道設計者の経験やセンスが表れるのではないかと思っています」
(*2)ランデブー...探査機が目標の天体に速度を合わせ、同じ軌道を航行すること。
(*3)フライバイ...探査機が天体の近くを通過するなかで、観測を行うこと。
小惑星探査機「はやぶさ2」
拡張ミッション「はやぶさ2#(シャープ)」
小惑星リュウグウの試料を地球に届けた後も航行を続けている小惑星探査機「はやぶさ2」。拡張ミッションとして、地球の公転軌道近くをまわる二つの小惑星「1998 KY26」「2001
CC21」の探査を目指す。最終目標の1998 KY26には、2031年に到着予定。

池田人 IKEDA Hitoshi
研究開発部門 第一研究ユニット
鹿児島県出身。探査機の軌道推定、天体の重力場解析、宇宙機の軌道力学系運用、運用設計等に従事。趣味はサッカー観戦。アビスパ福岡のファン。

植田聡史 UEDA Satoshi
研究開発部門 第一研究ユニット 研究領域主幹
大阪府出身。研究開発部門で航法誘導制御・軌道力学分野の技術グループを統括。SLIMプロジェクトでは、着陸降下のための誘導アルゴリズムを大学研究者らと共に考案した。社内のラグビーチームで楕円球の力学を探求していた。最近はジョギングしながら史跡をめぐっている。
杉本理英 SUGIMOTO Yoshihide
宇宙科学研究所 深宇宙追跡技術グループ
福岡県出身。軌道力学分野を専門とし、深宇宙追跡技術グループで探査機の軌道決定や地上系の検討に従事。SLIMプロジェクトでは、軌道設計・軌道決定等に携わる。SF物の 映画や海外ドラマを見ることが日ごろの楽しみで、アメコミヒーローのような体を目指して肉体改造中。

佐伯孝尚 SAIKI Takanao
宇宙科学研究所 「はやぶさ2」プロジェクトエンジニア
広島県出身。探査機システム、軌道・姿勢制御を専門とし、「はやぶさ2」の運用フェーズでは探査機システムを取りまとめるプロジェクトエンジニアに。子どもの頃の夢は宇宙飛行士。好きな食べ物はお好み焼き。野球では大の広島カープファン。
軌道図イラスト:bowlgraphics 文:熊谷麻那
著作権表記のない画像は全て©JAXAです。