
軌道決定・DDOR
竹内 央
「はやぶさ2」はJAXAの探査機では初めて、バス通信系のトランスポンダ(電波中継器)にDDOR(Delta Differential One-way Range)計測用のマルチトーン信号送信機を搭載しています。DDORとは、遠く離れた2局の地上アンテナで電波を同時に受信して信号の受信時刻差を計測することにより、天球面上の探査機の位置を計測する技術です。天球面上で探査機の近傍に位置する遠方の活動銀河核電波源(クェーサー)と探査機を10~15分ごとに切り替えて交互に観測することにより、角分解能数ナノradian(1AU[約1億5000万km]先で数百mの位置精度に相当)という非常に高い精度で探査機位置を測定できます(従来の手法では1マイクロradian程度)。
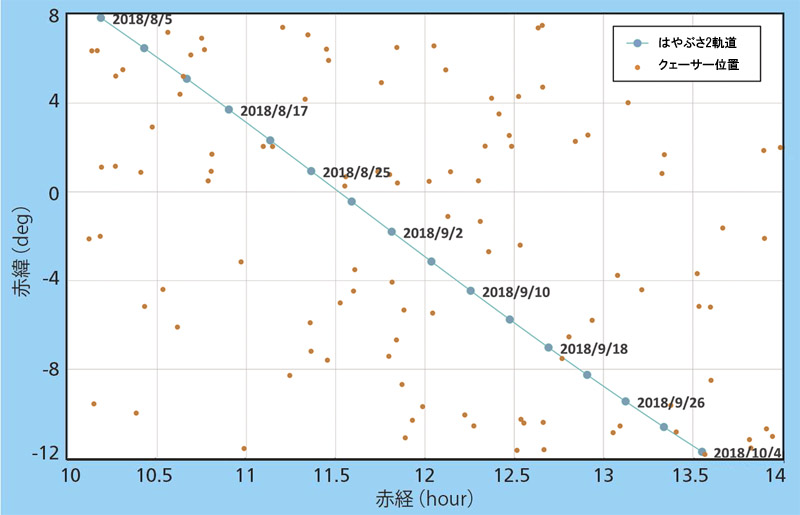
| 図1 | 1999 JU3近接フェーズにおける探査機の天球面軌跡と近傍クェーサー [クリックで画像拡大] |
「はやぶさ2」のターゲットである小惑星1999 JU3への誘導は、NASA JPLが提供している惑星暦DE430の軌道情報に基づいて行います。DE430が準拠している慣性座標系ICRF2はクェーサー位置に基づいて定義されているので、DDORの利用によって、より直接的にターゲットへ誘導できるようになります。DDORの計測精度は近年のデジタル受信技術の性能向上によって年々向上しており、特にNASAの火星探査ミッションなどの精密誘導が求められる惑星探査ミッションでは必要不可欠の技術になっています。
ただし「はやぶさ2」の場合は、DDORによって探査機の絶対位置が正確に求まったとしても1999 JU3の位置が正確には分からないので、着陸のための誘導に使うことはできません。電波航法(レンジ、ドップラ、DDORによる航法)で小惑星近傍5000km程度まで接近した後は、光学航法カメラ(ONC)で小惑星の方向を測定し、相対航法(OP-NAV)で接近する必要があります。このフェーズでは、 DDORと光学観測を組み合わせて、小惑星と探査機の軌道を同時に推定し誘導に利用することを計画しています。小惑星到着後も小惑星の軌道暦精密化のための計測を定期的に行います。
「はやぶさ2」の軌道決定で困難な点の一つに、イオンエンジン稼働中の軌道決定が挙げられます。「はやぶさ2」ではイオンエンジン推力や姿勢の状況を伝えるテレメトリを効率化する工夫が加えられており、「はやぶさ」のときよりも効果的に軌道決定を行える見込みです。イオンエンジンの加速度推定の不定性が大きくどうしても軌道決定ができない時期であっても、DDORとレンジ計測を組み合わせる「3次元位置計測」を一定の頻度で行えば、誘導に大きなずれがないかをモニタできるであろうと考えています。
「はやぶさ2」の軌道決定で新しい点の一つとして、Ka帯(約32GHzの周波数の電磁波)の利用が挙げられます。現在ICRF2はX帯(約8GHzの周波数の電磁波)のクェーサー位置で定義されています。クェーサーは宇宙論的距離に位置していて地球から見た見掛けの大きさは1ナノradian程度と非常に小さいですが、DDOR計測ではこの大きさが有意な位置計測誤差になってしまいます。一般的にクェーサーは高周波になるほど構造がコンパクトであり、Ka帯ではX帯に比べ1/3程度の大きさです。そのため将来のさらなる高精度な座標系として、2018年ごろの完成を目指して準備中のICRF3ではKa帯のクェーサー位置が定義される予定になっています。「はやぶさ2」が小惑星に到着するころには、世界で初めてICRF3に基づいてKa帯DDORによる軌道決定が行われるかもしれません。
DDORを軌道決定に利用するためには数十ピコ秒の時刻精度の観測モデルが必要になりますが、従来のJAXAの深宇宙軌道決定ソフトウェアは数ナノ秒レベルの精度しかありませんでした。そこで小型ソーラー電力セイル実証機「IKAROS」のDDOR実験のために筆者が開発したソフトウェアのアルゴリズムをJAXAのシステムに技術移転し、精度向上を図りました。大気遅延補正は、従来、臼田・内之浦局の過去の気象の平均値を用いて行っていました。新システムでは、ヨーロッパ中期予報センターが毎日提供している全球数値気象モデルに基づいて補正量を計算します。このモデルは「はやぶさ2」の第一可視運用でも使用され、金星探査機「あかつき」の第一可視などのときよりもずっと低い、仰角数度の時点で捕捉を開始することができました。電離層補正は臼田にあるGPS観測点の解析データを利用します。そのほか、最新の地球回転モデルや最新の地球局位置モデル(東北地方太平洋沖地震後の臼田局位置の余効変動モデルを含む)の採用、太陽系重心天文座標系の定義や時系変換の計算における一般相対論の厳密な適用などの改善を図り、DDORを使用するに足る精度にまでソフトウェアを改良することができました。

| 図2 | 臼田宇宙空間観測所の64mアンテナ(奥)と電離層補正用GPSアンテナ(手前) |
(たけうち・ひろし)