「こうのとり」はどうやってISSに向かうのですか
国際宇宙ステーションについて
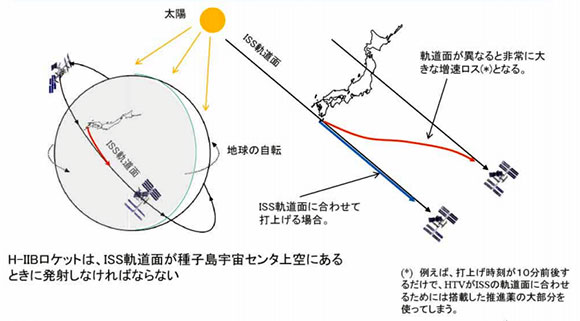
「こうのとり」は種子島宇宙センターからH-IIBロケットで打ち上げられます。
この時もっとも効率よく、ロケットの燃料が少なくて済むように、ISSの軌道面が種子島宇宙センターを横切るタイミングで打ち上げます。
ISSは90分で地球を一周しており、このISSが地球を周回する面を軌道面と呼びます。
地球は24時間で1回転するので、1日に2回ISSの軌道面が種子島を横切ります。
ISSの軌道面に合わせて、ISSの進行方向と同じ方向に打ち上げられたH-IIBロケットは、打上げから約16分後に「こうのとり」を分離し、H-IIBロケットはその使命を終えます。
この時点で「こうのとり」は種子島から4080km、高度287kmの地点を秒速7.7kmという速度で飛行しています。
「こうのとり」の姿勢を安定させる制御を行い、打上げから1時間26分後(地球1周後)に姿勢制御は完了します。
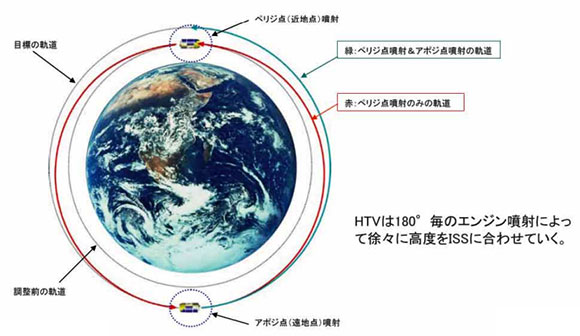
「こうのとり」は、ISSの軌道高度まで一気に行く程のエンジンも燃料も搭載できないので、少しずつ高度を上げてISSに近づいていきます。
打上げから約7時間33分(地球5周回)後に最初の軌道高度上昇を行い、その後打上げ3日目から5日目にかけて3回の軌道高度上昇を行います。複数回に分けて行うことで、軌道高度上昇の様子を見ながら調整できるのです。
打上げから5日目には、ISSと同じ高度でISSの後方に到着します。
そこからはさらに慎重に近づいていきます。ISS後方23km地点からはISSと「こうのとり」は直接通信が行えるようになり、お互いの位置を精密に確認します。
通信を行いながら徐々に近づき、約5kmの地点で一旦接近を停止します。ISSも「こうのとり」も秒速約7.8kmという速度で飛行していますがお互いの速度差を0にすれば相対的に停止した状態になります。
そこからさらに慎重に近づき、ISS下方500mまで移動してレーザセンサを使いながら1分間に1~10mという速度でISSに接近します。
ISSの下方10mまで近づきお互いの速度差を0にしたら、ISSのロボットアームで「こうのとり」を掴みます。
そしてロボットアームを制御してISSの結合部分に取り付けます。
ISSと「こうのとり」が並んで飛行しISSのロボットアームで掴むということは、高速道路を全開で飛ばして並走しているバイク同士で手を繋ぐようなものです。それを時速約28,000kmで行っているのです。